In this post, we provide readers with Python code that enables the derivation of Padé approximants from series coefficients given as input to the algorithm in the form of a coefficient vector. It is also necessary to predefine the degree of the numerator and denominator.
import sympy as sp
def pade_approximation_function(series, m, n):
"""
Returns the Padé approximation [m/n] in the form of a rational function
with coefficients simplified as fractions.
Parameters:
series : list - Coefficients of the Taylor series (e.g., [1, 0, -1/2, 0, 1/24, ...] for cos(x))
m : int - Degree of the numerator
n : int - Degree of the denominator
Returns:
sympy.Expr - Rational function P(x)/Q(x) with simplified fractions
"""
# Check that there are enough terms in the series
if len(series) < m + n + 1:
raise ValueError(f"The series must contain at least {m + n + 1} terms for an [m/n] approximation")
# Convert the series coefficients to simplified fractions
series = [sp.simplify(sp.Rational(str(c))) for c in series]
# Symbolic variable
x = sp.Symbol('x')
# Coefficients of the numerator P(x) = a0 + a1*x + ... + am*x^m
a = [sp.Symbol(f'a{i}') for i in range(m + 1)]
# Coefficients of the denominator Q(x) = 1 + b1*x + ... + bn*x^n (b0 = 1)
b = [1] + [sp.Symbol(f'b{i}') for i in range(1, n + 1)]
# Polynomials P(x) and Q(x)
P = sum(ai * x**i for i, ai in enumerate(a))
Q = sum(bi * x**i for i, bi in enumerate(b))
# The truncated series in polynomial form
S = sum(c * x**i for i, c in enumerate(series))
# Equation to solve: P(x) - Q(x)*S(x) = 0 up to order m+n
expr = P - Q * S
# Extract coefficients of x^0 to x^(m+n) and set the equations to 0
equations = [sp.expand(expr).coeff(x, k) for k in range(m + n + 1)]
# Variables to solve for (a0, a1, ..., am, b1, b2, ..., bn)
unknowns = a + b[1:]
# Solve the system
solution = sp.solve(equations, unknowns)
if not solution:
raise ValueError("No solution found for this approximation")
# Simplified coefficients for P(x) and Q(x)
num_coeffs = [sp.simplify(sp.Rational(str(solution[ai]))) if ai in solution else 0 for ai in a]
den_coeffs = [1] + [sp.simplify(sp.Rational(str(solution[bi]))) if bi in solution else 0 for bi in b[1:]]
# Construct the final polynomials
P_final = sum(coef * x**i for i, coef in enumerate(num_coeffs))
Q_final = sum(coef * x**i for i, coef in enumerate(den_coeffs))
# Return the simplified rational function
return sp.simplify(P_final / Q_final)
Here is the code to compute the Padé(2,2) for 
# Compute Padé(2,2) for cos(x)
series = [1, 0, -sp.Rational(1,2), 0, sp.Rational(1,24)]
m, n = 2, 2
pade_approx = pade_approximation_function(series, m, n)
print("Padé(2,2) approximant for cos(x):")
sp.pprint(pade_approx)


















 :
:



 :
:







 , the equation becomes:
, the equation becomes:
 as a geometric series. For the ground state
as a geometric series. For the ground state  we write:
we write:







 (to recover the initial differential equation) we have:
(to recover the initial differential equation) we have:
 and the exact solution is 1.3924.
and the exact solution is 1.3924. is:
is:
 and
and  ) that Padé approximants:
) that Padé approximants:

 . This function has two poles at
. This function has two poles at  and
and  .
.
 approximant is (calculations were made according to the linear systems presented in
approximant is (calculations were made according to the linear systems presented in 
 (the total number of poles) we recover the original function since
(the total number of poles) we recover the original function since  . The graphs of the
. The graphs of the  ,
, 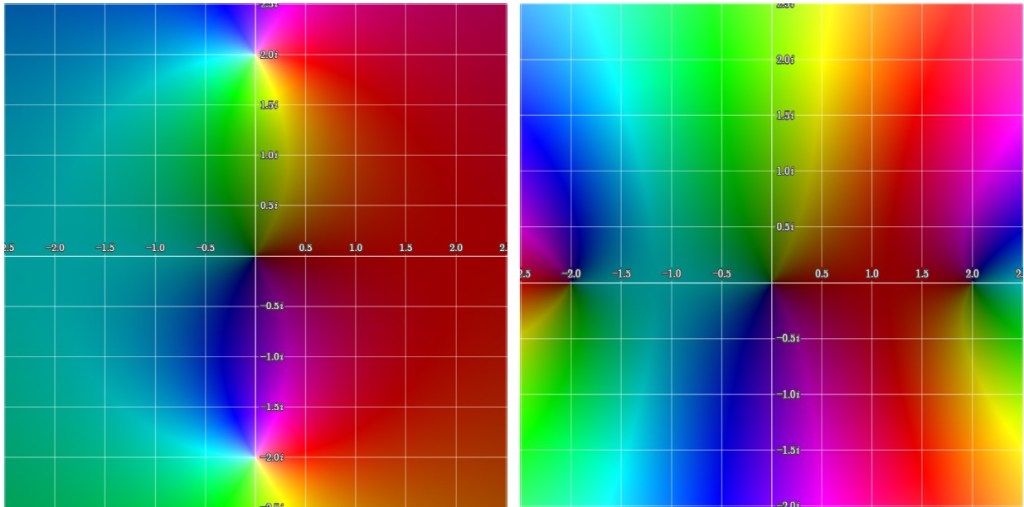


 -plane. The poles at
-plane. The poles at  and
and  are clearly visible on the left picture. Hue and brightness are used to display phase and magnitude, respectively.
are clearly visible on the left picture. Hue and brightness are used to display phase and magnitude, respectively.

 function. The improvement of the approximation between
function. The improvement of the approximation between  is visible on the figures.
is visible on the figures.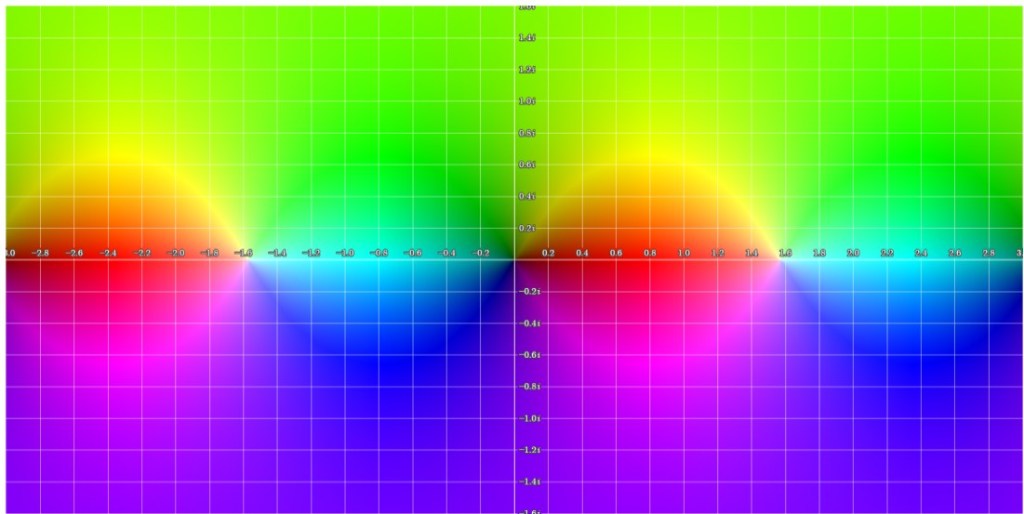


 dont les
dont les  pôles les plus rapprochés de l’origine sont intérieurs à un cercle (C) lui-même intérieur aux pôles suivants, chaque pôle multiple étant compté pour autant de pôles simples qu’il existe d’unités dans son degré de multiplicité, la fraction continue déduite de la ligne horizontale de rang
pôles les plus rapprochés de l’origine sont intérieurs à un cercle (C) lui-même intérieur aux pôles suivants, chaque pôle multiple étant compté pour autant de pôles simples qu’il existe d’unités dans son degré de multiplicité, la fraction continue déduite de la ligne horizontale de rang  , où
, où  est l’affixe du pôle le plus rapproché de l’origine parmi tous ceux qui sont extérieurs au cercle (C). Si tous les pôles ont des modules différents, les fractions continues correspondant aux lignes horizontales représentent toute la fonction ; s’il existe simplement des discontinuités dans l’ensemble linéaire des modules des pôles, les fractions continues correspondant à des lignes horizontales convenablement choisies représentent encore la fonction. Si tous les pôles sont simples, la représentation a lieu dans des cercles d’autant plus grands que la ligne horizontale choisie est plus éloignée dans le Tableau. S’il y a des pôles multiples, il y a stationnement, en ce sens que plusieurs lignes horizontales consécutives représentant la fonction ont le même rayon de convergence. S’il y a enfin un point singulier essentiel, le stationnement se prolonge indéfiniment, aucune des fractions continues considérées ne représente la fonction en dehors du cercle sur la circonférence duquel se trouve le point singulier essentiel le plus rapproché de l’origine.”
est l’affixe du pôle le plus rapproché de l’origine parmi tous ceux qui sont extérieurs au cercle (C). Si tous les pôles ont des modules différents, les fractions continues correspondant aux lignes horizontales représentent toute la fonction ; s’il existe simplement des discontinuités dans l’ensemble linéaire des modules des pôles, les fractions continues correspondant à des lignes horizontales convenablement choisies représentent encore la fonction. Si tous les pôles sont simples, la représentation a lieu dans des cercles d’autant plus grands que la ligne horizontale choisie est plus éloignée dans le Tableau. S’il y a des pôles multiples, il y a stationnement, en ce sens que plusieurs lignes horizontales consécutives représentant la fonction ont le même rayon de convergence. S’il y a enfin un point singulier essentiel, le stationnement se prolonge indéfiniment, aucune des fractions continues considérées ne représente la fonction en dehors du cercle sur la circonférence duquel se trouve le point singulier essentiel le plus rapproché de l’origine.” and meromorphic with precisely
and meromorphic with precisely  poles (multiplicity counted) in the disk
poles (multiplicity counted) in the disk  . Let D be the domain obtained from
. Let D be the domain obtained from  sufficiently large, there exists a unique rational function
sufficiently large, there exists a unique rational function  of type
of type  , which interpolates
, which interpolates  . Each
. Each  , these poles approach the
, these poles approach the  (with multiplicity included) in
(with multiplicity included) in  of
of  converge on:
converge on:
 . In particular:
. In particular:



















 , with
, with  , and assume
, and assume  at
at  . If
. If  , then the
, then the ![[n/m]](https://s0.wp.com/latex.php?latex=%5Bn%2Fm%5D&bg=ffffff&fg=000&s=0&c=20201002) Padé approximant of
Padé approximant of  :
:
 .
.

 is bounded near
is bounded near 
 is the
is the  . For example, for
. For example, for  , the
, the ![[2/2]](https://s0.wp.com/latex.php?latex=%5B2%2F2%5D&bg=ffffff&fg=000&s=0&c=20201002) Padé approximant can be computed, and
Padé approximant can be computed, and  yields a consistent
yields a consistent  ) and at least
) and at least ![[m/n]](https://s0.wp.com/latex.php?latex=%5Bm%2Fn%5D&bg=ffffff&fg=000&s=0&c=20201002) Padé approximant exists and is unique (guaranteed if the Hankel determinant is non-zero), then
Padé approximant exists and is unique (guaranteed if the Hankel determinant is non-zero), then  and
and  .
.
 :
:
 , and the error term remains of order
, and the error term remains of order  . Thus,
. Thus,  satisfies the same Padé condition as
satisfies the same Padé condition as  . By uniqueness of the
. By uniqueness of the 
 . The Maclaurin series of
. The Maclaurin series of 
![x \in ]-1,1[](https://s0.wp.com/latex.php?latex=x+%5Cin+%5D-1%2C1%5B&bg=ffffff&fg=000&s=0&c=20201002) . We can calculate the corresponding
. We can calculate the corresponding 







 ,
,  and
and  and the
and the 

 . Let’s pretend for a moment that solving this equation is a very difficult problem because we don’t know how to solve separable differential equations.
. Let’s pretend for a moment that solving this equation is a very difficult problem because we don’t know how to solve separable differential equations.











 (since
(since  ) implies
) implies  . An approximation of the solution to the differential equation is therefore:
. An approximation of the solution to the differential equation is therefore:
 which is the exact solution to the differential equation. In fact, the diagonal sequence of Padé approximants (
which is the exact solution to the differential equation. In fact, the diagonal sequence of Padé approximants ( ) recovers
) recovers 
