For a function 


valid within its radius of convergence 
![[m/n]](https://s0.wp.com/latex.php?latex=%5Bm%2Fn%5D&bg=ffffff&fg=000&s=0&c=20201002)




near 

Formally, for a meromorphic function 
![[n/n]](https://s0.wp.com/latex.php?latex=%5Bn%2Fn%5D&bg=ffffff&fg=000&s=0&c=20201002)



Let 


near 
The zeros of
For a function
valid within its radius of convergence
near
Formally, for a meromorphic function
Let
near
The zeros of
Let 



The numerator 

The compact form of Nuttall’s Padé approximant
By expressing the denominator
This formulation simplifies calculations, facilitates the study of convergence properties, and connects Padé approximants to orthogonal polynomials, enabling applications in areas like quantum field theory and asymptotic analysis where rapid computation and singularity detection are essential.
A well-known continued fraction representation of 

Using the procedure described in the previous post, we can show that the near-diagonal Padé coefficients presented in this post can be converted to a sequence of truncated fractions corresponding to the continued fraction above (see figures below).

|

|

|

|

|
|
|---|---|---|---|---|---|
|
|
 |
 |
… | ||
|
|
 |
 |
… | ||
|
|
 |
 |
… | ||
|
|
… | ||||
| … | … | … | … | … | … |
Caption: Padé Approximants P(m,n) for
The relationship between Padé approximants and continued fractions is a profound connection in mathematical analysis, particularly for approximating functions like
A function with a convergent Taylor series around 


When this “Padé table” is normal (i.e., 

Under these conditions, one can systematically derive a continued fraction whose successive convergents exactly match the Padé approximants.
This establishes a rigorous connection between the Taylor series, Padé approximation, and continued fraction representation of the function.
We can use Padé approximants to build a sequence of truncated continued fractions representing a given function. For example using 

Solving the linear systems presented in post Computing Padé approximants sequentially leads to:



Setting 





Now define:

We have:

The basic idea beyond Padé approximants is to construct a rational fraction whose Taylor series expansion near the origin coincides with that of a given function up to the maximum order. In the previous sections we introduced Padé approximants
We have observed (in particular through the examples concerning 

Converge beyond the disc of convergence of the entire series
Speed up convergence
Extend the notion of series
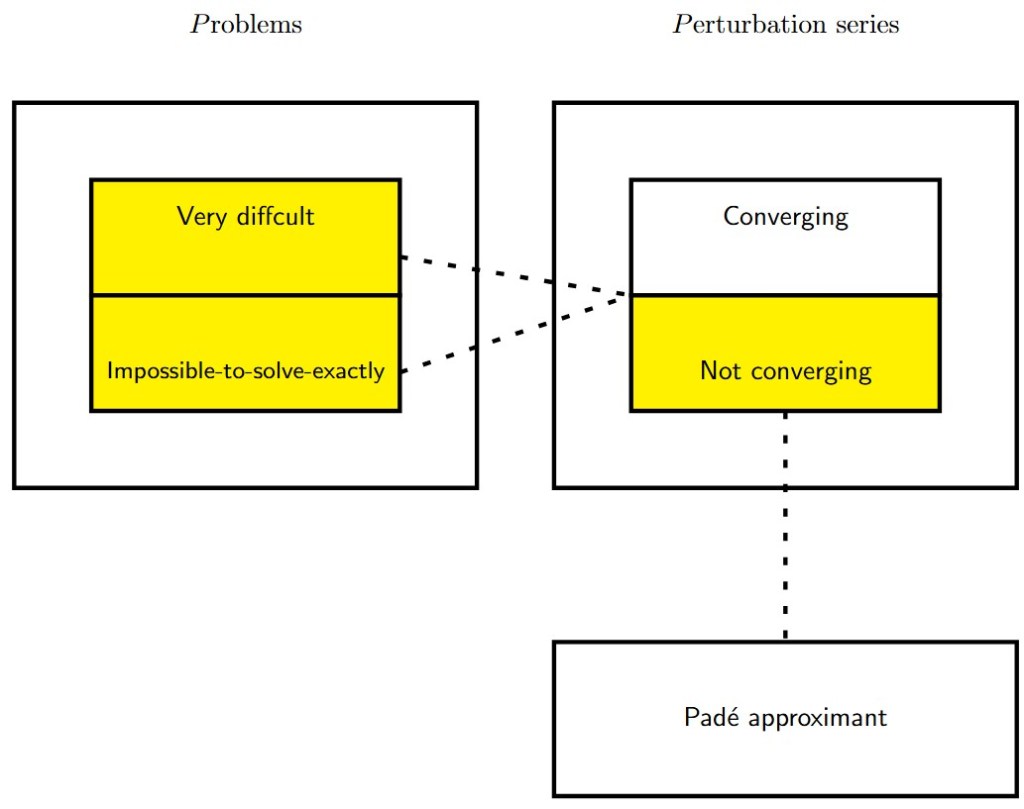
Now, let’s imagine that we want to solve a problem that is very difficult or even impossible to solve exactly (i.e. a specific differential equation, extracting the roots of a polynomial, etc.). We can split the problem into an infinite number of simple problems. This is the principle of perturbation theory (which is in many cases the only way to solve the problem). The result of such a procedure is a geometric series (we will see this later). In a very large number of cases, this series does not converge. In these cases, we can use Padé approximants to ‘extract’ the information contained in the series and finally obtain a convergent rational function (as illustrated in the case of the functions
The figure below presents schematically a potential application of Padé approximants in this context.
We will first illustrate the Montessus’s theorem with the function:

where 


The corresponding Maclaurin series is:

The corresponding 

We see that, in this case, if we set 

Left, graph of

and its corresponding

in the complex 


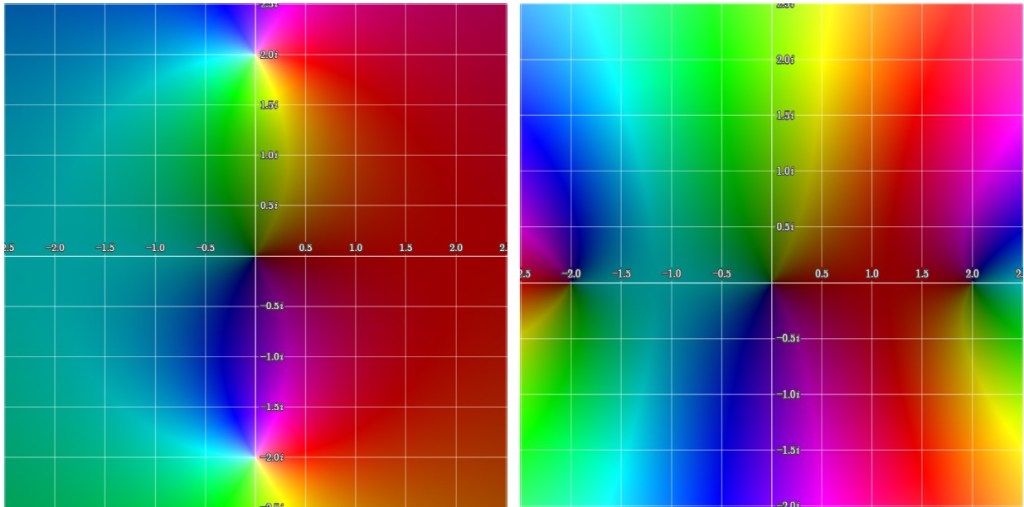
The Montessus’s theorem is also illustrated in the figures below for the function tan(z).

and

of the 

Graph of tan(z):
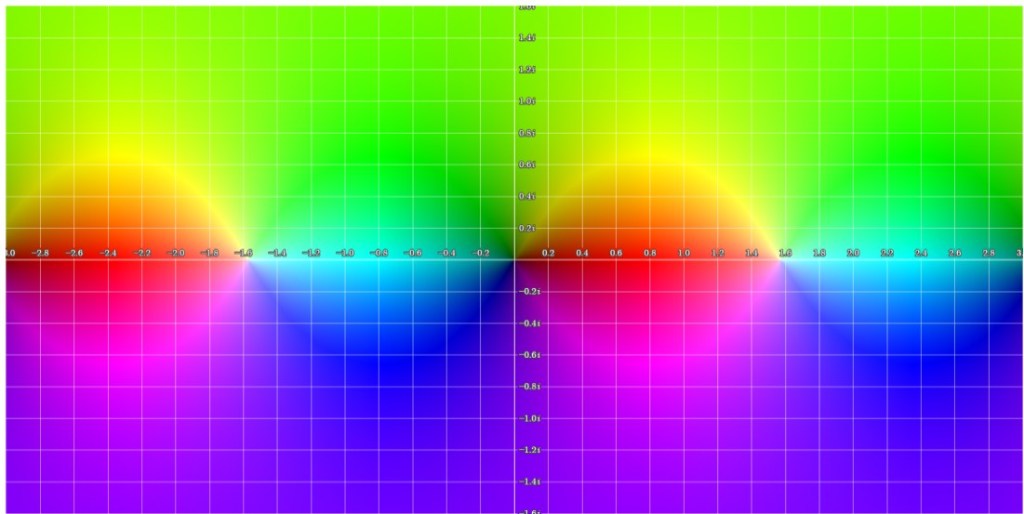
Graphs of the P(2,2) (left) and P(4,2) (right) of tan(z):


Pictures were produced using: Samuel Jinglian, 2018. “Complex Function Plotter.” https://samuelj.li/complex-function-plotter/.
In the previous post we gave a modern definition of Montessus’s theorem. Here is the original formulation from R. De Montessus (1902):
“Il ressort de ces considérations qu’étant donnée une série de Taylor représentant une fonction 



References:
For row sequences on the Padé table, Montessus’s theorem (1902) proves convergence for functions meromorphic on a disk. Before giving the statement of the theorem, we would like to remind the reader of a few definitions:
Holomorphic function: A holomorphic function is a complex-valued function of one or more complex variables that is complex differentiable in a neighborhood of each point in a given domain.
Analytic function: An analytic function is a function that is locally given by a convergent power series.
Meromorphic function: A meromorphic function on an open subset D of the complex
Here is the Montessus’s theorem as stated by E. B. Saff in 1972:
Let 







Alternative formulation:
Let 


to 

The Padé table is represented as follows:
 |
 |
 |
 |
 |
|
|
 |
 |
 |
 |
|
 |
|
 |
 |
|
 |
|
 |
|
 |
 |
 |
|
|
 |
|
|
|
|
|
|
||
|
|
|
|
 |
|
The Montessus’s theorem is crucial in approximation theory as it ensures the uniform convergence of Padé approximants for meromorphic functions, enhancing the accuracy of rational approximations.
Let 




![[n/m]](https://s0.wp.com/latex.php?latex=%5Bn%2Fm%5D&bg=ffffff&fg=000&s=0&c=20201002)


provided 
Proof: Given

Since

Since 

indicating that 


![[2/2]](https://s0.wp.com/latex.php?latex=%5B2%2F2%5D&bg=ffffff&fg=000&s=0&c=20201002)

If 


Proof: Since

Evaluate at 

since 




In this post we will have a look at the Padé approximants of 

which converges for ![x \in ]-1,1[](https://s0.wp.com/latex.php?latex=x+%5Cin+%5D-1%2C1%5B&bg=ffffff&fg=000&s=0&c=20201002)




Keeping only degrees up to 2:

This implies:



Therefore, 



This is an exceptional result since the Padé approximant
Let’s imagine that we would like to solve the following differential equation:

This differential equation can be solved exactly since it is separable. The solution is 
A possible approach is to consider a solution of the form:

Then we have:






We can write the differential equation keeping only terms up to two:


we obtain:



Setting 



As presented above, the corresponding 

So, for this differential equation, we have the following pattern:

