In the previous posts, we have seen that in order to compute the Padé coefficients  corresponding to a given geometric series we have to be invert the following matrix:
corresponding to a given geometric series we have to be invert the following matrix:
Where  are the coefficients of the Taylor series. The matrix above is called a “Hankel matrix”. A ‘Hankel Matrix’ is a symmetric square matrix in which each ascending skew-diagonal from left to right is constant. For Example a Hankel matrix of size 5 can be written like this:
are the coefficients of the Taylor series. The matrix above is called a “Hankel matrix”. A ‘Hankel Matrix’ is a symmetric square matrix in which each ascending skew-diagonal from left to right is constant. For Example a Hankel matrix of size 5 can be written like this:
Let’s make some observations on the Hankel determinant  :
:
This determinant has n colons and n rows. We can also numerate the terms of the determinant following the notation:
Where  etc. This notation of the terms of the determinants implies that:
etc. This notation of the terms of the determinants implies that:
So that:
If  is a even function of class
is a even function of class  , we see that odd coefficients
, we see that odd coefficients  . In this case, every second term of in the Hankel matrix is zero. If is even, we can establish that if
. In this case, every second term of in the Hankel matrix is zero. If is even, we can establish that if  and
and  are odd then the Hankel determinant is zero:
are odd then the Hankel determinant is zero:
The term with index  of the Hankel determinant is
of the Hankel determinant is  . As stated before, this term is zero for an even function if
. As stated before, this term is zero for an even function if  is odd. Now, if and are odd this means that
is odd. Now, if and are odd this means that  is even and is odd when
is even and is odd when  is even. It follows that, in the case of an even function, the Hankel determinant is of the form:
is even. It follows that, in the case of an even function, the Hankel determinant is of the form:
We observe that the odd rows of this determinant are linear combinations of:
This implies that odd-numbered columns are linked and therefore the determinant is zero.
As example we will derive the  of the cosine function. First we have to consider the geometric series of degrees up to
of the cosine function. First we have to consider the geometric series of degrees up to  of cosine:
of cosine:
For  and
and  ( and are both odd) the Hankel determinant is:
( and are both odd) the Hankel determinant is:
The corresponding Hankel determinant for calculating the coefficients of the Padé approximant of the geometric series of cosine is therefore:
This implies that we cannot calculate the approximant for the cosine function.
In conclusion, for an even function like cosine, when m and n are odd, the Hankel determinant Hn,m(f) is zero due to the linear dependence of the columns.
































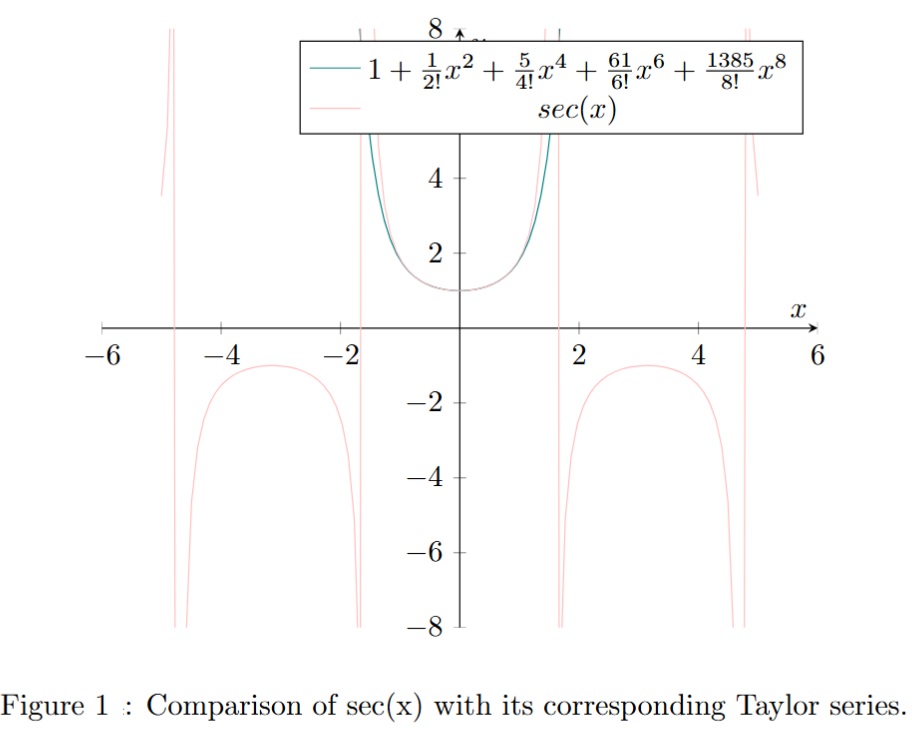
 function. The approximation was not very impressive compared to the Maclaurin series of
function. The approximation was not very impressive compared to the Maclaurin series of  since the latter converges for all
since the latter converges for all  . In this post we will have a look at the Padé approximants and Maclaurin series of
. In this post we will have a look at the Padé approximants and Maclaurin series of  .
.

 are so-called Euler numbers:
are so-called Euler numbers:
 approximant of
approximant of 
 and
and  we have:
we have:





 coefficients:
coefficients:





















 . Solving systems presented in the previous posts, leads to the following table:
. Solving systems presented in the previous posts, leads to the following table:




























 evaluated at x = 1, using the exact value
evaluated at x = 1, using the exact value  are shown in the table below:
are shown in the table below:











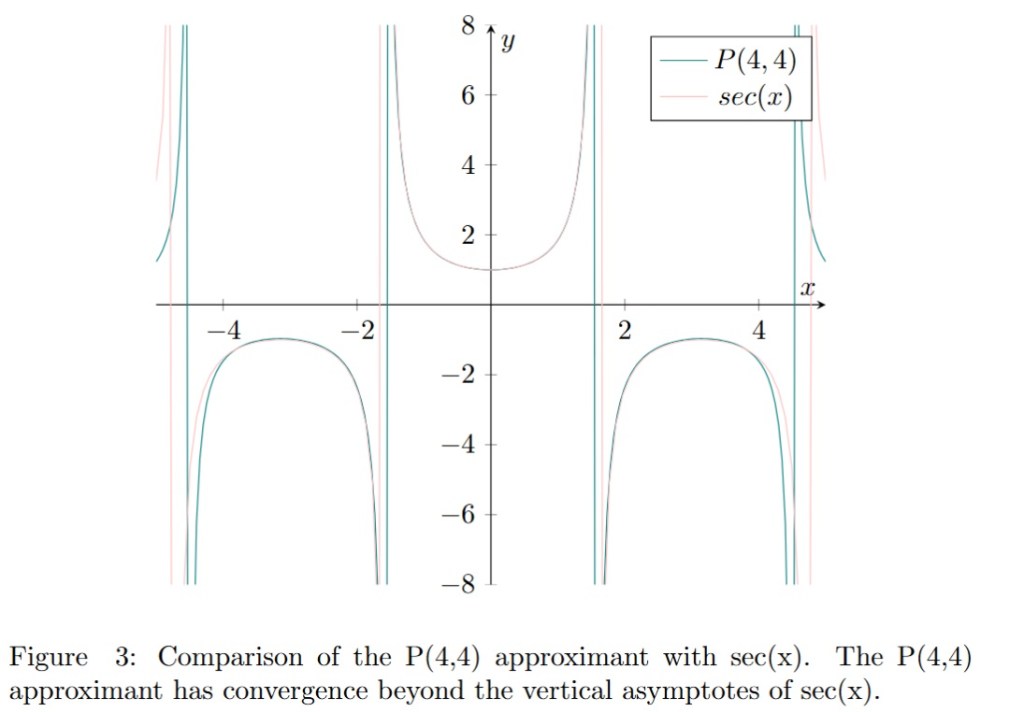
 , approaching it from both sides. In contrast, the Taylor approximations converge monotonically from below.
, approaching it from both sides. In contrast, the Taylor approximations converge monotonically from below.














 up to terms
up to terms  :
:
 and
and  , the Hankel determinant (see previous
, the Hankel determinant (see previous 


 and
and  we have to solve:
we have to solve:
 and
and  .
. being set to one):
being set to one):

 ,
,  and
and  . The
. The 

