We have seen that Padé approximants offer a more efficient and flexible method for approximating functions than the Taylor expansion. They have been used in many areas of mathematics and physics.
We would like to find a more convenient way to calculate the Padé coefficients of any Taylor or Maclaurin series.
In the following post, we admit the existence of Padé approximants . It is generally possible to find the coefficients of the Padé approximants except in the case of degeneracy due to particular values of the coefficients of the corresponding series. We will not consider these cases in the rest of our study. Remember that we defined Padé approximants as rational functions:
If we want to solve a very hard or even impossible-to-solve-exactly problem using perturbation theory we will end up with a power series like . To convert this (potentially not converging) series to its corresponding Padé approximant we write (as described in the previous post):
From a purely algorithmic point of view and in order to calculate the Padé coefficients we drop :
Comparing each term of the geometric series on the right and the left of this equation (Uniqueness of power series coeffficients) we obtain the following set of equations:
Using for . We can split this system of equations in two parts and get rid of the x-terms. One part containing the coefficients (up to i+j = m) and the part without coefficients. The first system of equation is:
The second system of equations:
Setting without loss of generality the second system of equations becomes:
Changing the order of the coefficients gives:
We can write both systems using matrix notation:
Practically, we start calculations where . The resolution of the second system gives the values of the coefficients which are injected into the first system to obtain the coefficient (using ). So if the following determinant (called a ‘Hankel determinant’):
Is not null. i.e.:
the Padé approximant will be unique. The calculations for the Padé approximant coefficients yield a unique solution for any Taylor or Maclaurin series, provided the Hankel determinant is not null, excluding cases of degeneracy due to specific coefficient values.
We would like to represent functions using continued fractions (similarly as we did for numbers). For example, a well-known continued fraction representing is:
Continued fractions like this one typically have a bigger definition domain compared to the corresponding Taylor series. This is illustrated graphically in figure 1 and figure 2.
The continued fraction representation of a function seems a promising approach since the radius of convergence ‘seems’ at a first glance much bigger and the approximation ‘looks’ much better (i.e. converging faster) than for Taylor and Maclaurin series. We will illustrate these statements.
In order to make some progress in the construction of continued fractions corresponding to functions, we’ll start by defining the following rational functions, which will prove to have interesting properties in their own right:
Using the definitions above we present some examples using the first terms of the Maclaurin series of :
In the example above we are considering a rational function. So we consider up to 2 + 2 = 4 as the maximum degree we would like to consider for further computations. The equation above becomes:
Comparing the coefficients of both sides we obtain:
Solving the set of equations above gives:
This is clearly the first term of the continued fraction of as shown above.
as defined above are called Padé approximants. A Padé approximant is the “best” approximation of a function near a specific point by a rational function of given order. We also have convergence beyond the radius of convergence of the corresponding series.
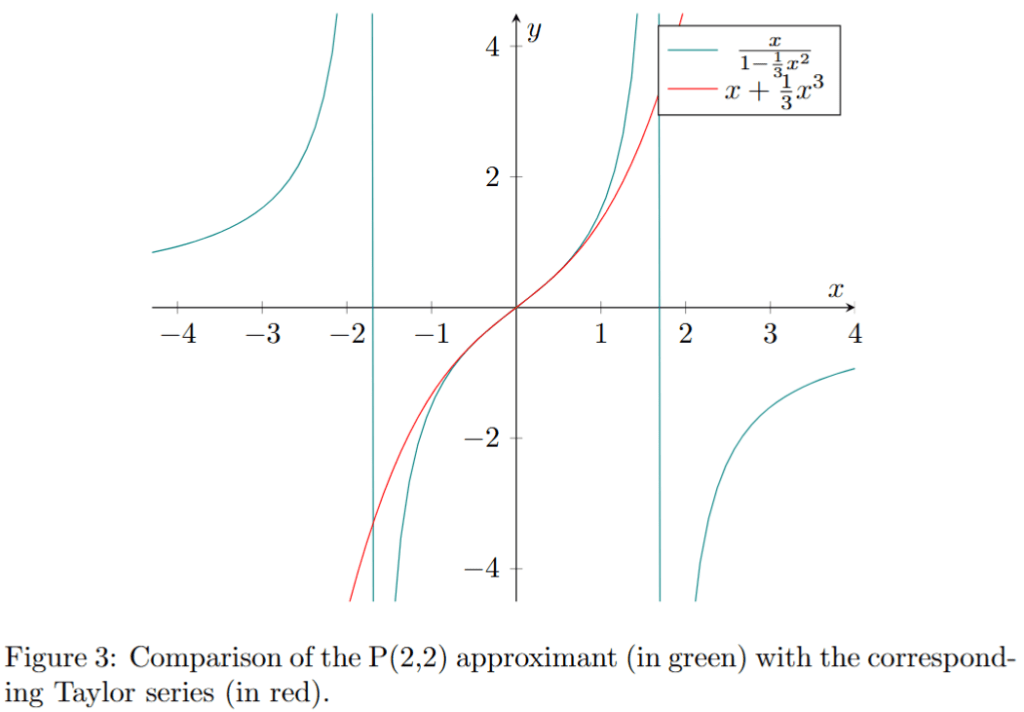
Let’s calculate the corresponding to the first terms of the Maclaurin series of . 1 + 2 = 3 implies that we have to consider the Taylor series up to degree 3.
Keeping only degrees up to 3:
Comparing the coefficients of both sides we obtain:
We observe that (in this case):
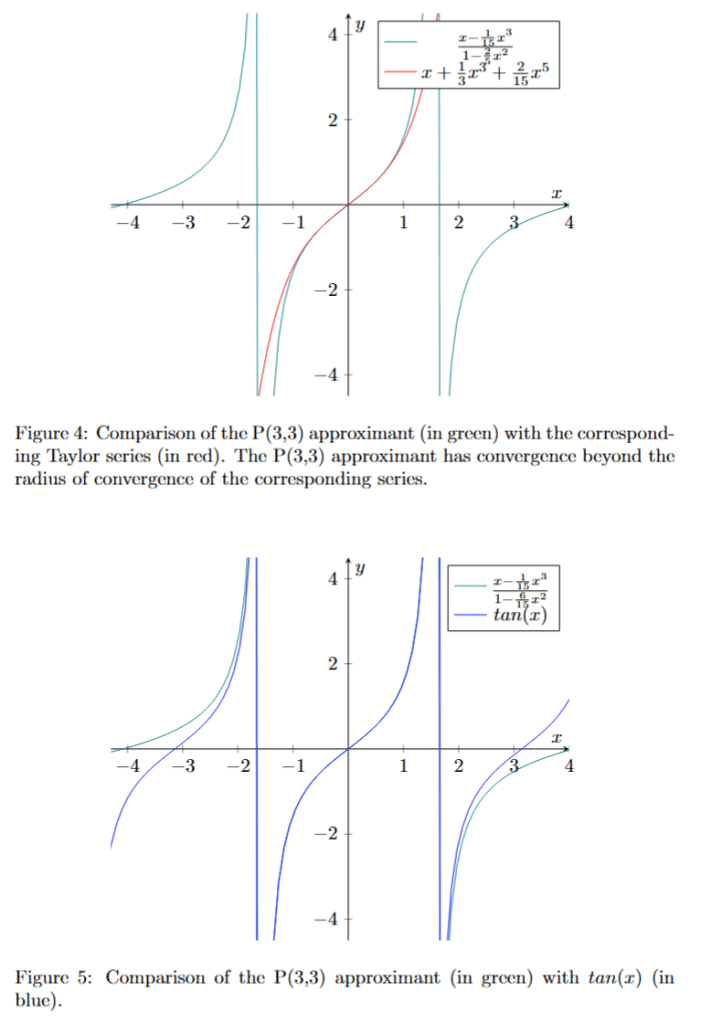
Now we calculate the corresponding to the first terms of the Maclaurin series of . 3 + 3 = 6 implies that we have to consider the Taylor series up to degree 5:
Keeping only degrees up to 6:
This implies:
Solving the set of equations above gives:
Now consider the first terms of the continued fraction of :
Therefore, the , and Padé approximants (see fig. 3, 4 and 5) of are equivalent to the first terms of its continued fraction as presented above.
The results above about suggest that a “Padé transformation” (i.e. converting a series into a rational function using the procedure described above) of a divergent Maclaurin and Taylor series is converging beyond the radius of convergence of the Maclaurin series.
This gives hope for the use of divergent series as often encountered in perturbation theory.
We would like to calculate the of . First, we would like to calculate . We, therefore, consider the Maclaurin series of up to 1 + 1 = 2 degrees:
Keeping only degrees up to 2:
This implies:
Solving the set of equations above gives:
We observe that is equivalent to the first term of the continued fraction of as presented above:
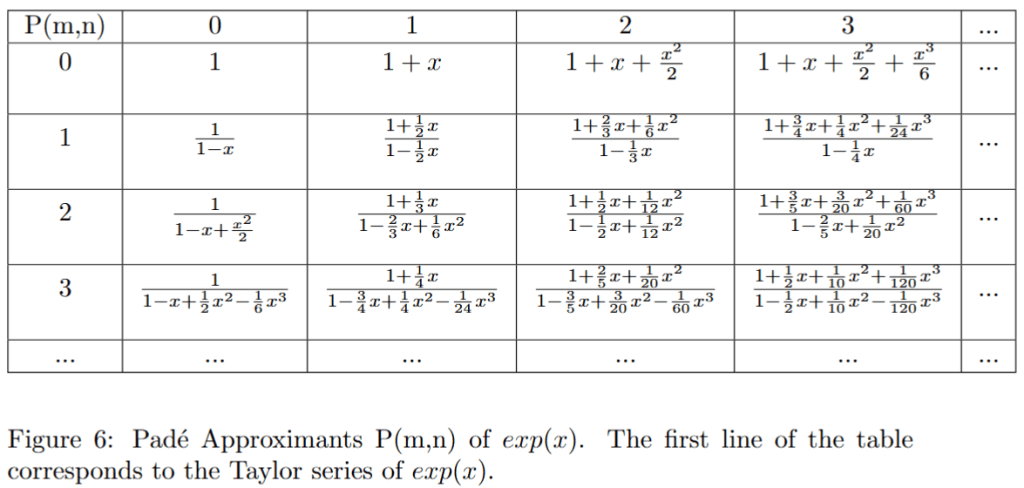
Figure 6 shows 16 Padé Approximants for . Figure 7 shows , , , and .
The coefficients of the Taylor and Maclaurin series are unique. We are going to demonstrate this assertion because this fact will be very important in the development of the approximation techniques that we want to illustrate in this course.
Consider the power series of the form:
z and being complex numbers, we will study the convergence of the above power series in the complex plane. If R is the largest radius such that the series converges for all , then R is called the 'radius of convergence'. In its radius of convergence the power series converges to :
Given function that is continuous on (a circle in the complex plane centred on with radius and oriented counterclockwise):
Using the theorem on integration of power series:
Defining :
the integral becomes:
Then:
Observing that:
the integral becomes:
Using the Cauchy formula for a holomorphic function:
We have:
From Cauchy formula:
Therefore, the given power series is exactly equal to the Taylor series for about the point and the coefficients are unique. The uniqueness of coefficients of Taylor and Maclaurin series will be used for solving very hard or even impossible-to-solve-exactly-problems with perturbation theory.
After looking at numbers, we will continue with a few practical observations about functions. The Taylor series of a real or complex-valued function that is infinitely differentiable at a real or complex number is the power series:
Using , we obtain the so-called Maclaurin series:
The series above are clearly “power series” since we could write them as:
and
respectively, using the definition for the Taylor series or for the Maclaurin series.
The Taylor series of a polynomial is the polynomial itself.
Taylor and Maclaurin series can be used in a practical way to program functions in a calculating machine or computer. A function such as or etc. has no meaning for a computer. For a computer, and are just symbols with no explicit algorithm defined to compute numerical results. Here are some Maclaurin series of important functions:
For programming the sine function we could use, for example, the series above as follows (in Python):
def sin(x):
epsilon = 1e-16
term = x
sine = x
sign = -1
n = 1
while abs(term) > epsilon:
term *= x * x / ((2 * n) * (2 * n + 1))
sine += sign * term
sign *= -1
n += 1
return sine
The aim of this section is to get us used to using geometric series or continued fractions to represent numbers. We will first have a look at some geometric series:
More generally, we can write a geometric series as:
Therefore:
We have to be careful using this formula, since the radius of convergence of is and is defined on . We can consider as some “representation” of on .
This formula allows us, for example, to find that the argument of the geometric series of 3 is ( ensures convergence of the series):
Now we can write as:
Instead of writing numbers as a geometric series, we could also decide to write a number as a continued fraction with the form:
To calculate the coefficients , we can use the continued fraction algorithm, which iteratively takes the integer part of the number and inverts its fractional part. In the case of the number , we proceed as follows:
The process repeats, leading to the coefficients , , , . Thus, we can write as a continued fraction:
The convergents of this continued fraction are:
These convergents approach . Note that an alternative method, such as associating the partial sums of a geometric series to a continued fraction, often leads to non-standard coefficients (e.g., negative or non-integer values like for or for ), which may cause convergence issues. The continued fraction algorithm ensures integer coefficients and reliable convergence.
To find a continued fraction for , we can use its decimal expansion or a series approximation. For example, we can use the following series:
Then we proceed as follows:
Let be the largest integer that does not exceed , namely :
Compute:
Continue iteratively:
Using this technique, the continued fraction for is:
The number itself does not appear as a coefficient in this continued fraction. We could also represent (or any real number) using a generalized continued fraction:
The general idea of this blog is to present mathematical techniques for solving complicated or even impossible-to-solve-exactly problems using approximation methods. In fact, the vast majority of problems encountered in mathematics or physics cannot be solved exactly, and most problems that could be solved exactly have already been solved.
We’ll primarily focus on a technique known as perturbation theory. Informally, perturbation theory is a method for tackling complex problems by reducing them to a sequence of simpler ones.
The basic principle: break a complex problem into many (potentially infinitely many) simpler ones, then “glue” their solutions together to approximate the solution to the original.
Before presenting perturbation theory, we need to develop approximation techniques for summing potentially divergent series. We will therefore begin by presenting various approximation and summation techniques. Our approach is closer to the methods of natural sciences than to the rigorous ‘Theorem-Proof’ style of pure mathematics. This mathematical style, although less rigorous, will enable us to solve problems that are challenging for the rigorous method. In this spirit, our presentation resembles that of a geologist or chemist discovering new minerals or elements: carefully recording observations in a field journal or lab notebook, making sense of what is seen, and developing concepts to address real problems.
In summary, we would like to present analytical approximation methods for solving problems that are difficult or impossible to solve exactly.
This particular approach to mathematics is not new; it has already been described by the great French mathematician Henri Poincaré in Chapter 8 of his book Les méthodes nouvelles de la mécanique céleste (1892). Henri Poincaré begins this chapter with the following comment concerning the summation of series:
“There is a sort of misunderstanding between geometers and astronomers about the meaning of the word convergence. Geometers, preoccupied with perfect rigour and often too indifferent to the length of inextricable calculations, the possibility of which they conceive without thinking of actually undertaking them, say that a series is convergent when the sum of the terms tends towards a given limit, even if the first terms decrease very slowly. Astronomers, on the other hand, are accustomed to saying that a series converges when the first twenty terms, for example, decrease very rapidly, even though the following terms should increase indefinitely.
So, to take a simple example, let’s consider the two series with general terms:
Geometers will say that the first converges, and even that it converges rapidly, because the millionth term is much smaller than the 999,999th; but they will regard the second as divergent, because the general term can grow beyond any limit.
Astronomers, on the other hand, will regard the first series as divergent, because the first 1000 terms are increasing; and the second as convergent because the first 1000 terms are decreasing and this decrease is initially very rapid.
Both rules are legitimate: the first, in theoretical research; the second, in numerical applications. Both must prevail, but in two separate domains whose boundaries must be clearly defined.”
Another historical example from theoretical physics vividly illustrates Poincaré’s point. In quantum electrodynamics (QED), the perturbative series expansions are divergent in the “geometer’s” sense. However, by keeping only the first few terms — since calculating further terms becomes prohibitively difficult — physicists obtain predictions that match experimental results with astonishing precision.
In 1965, the Nobel Prize in Physics was awarded to Feynman, Schwinger, and Tomonaga for their groundbreaking work in QED using these techniques. Poincaré would likely have counted them among the “astronomers.”




































 is:
is:











 rational function. So we consider up to 2 + 2 = 4 as the maximum degree we would like to consider for further computations. The equation above becomes:
rational function. So we consider up to 2 + 2 = 4 as the maximum degree we would like to consider for further computations. The equation above becomes:





 corresponding to the first terms of the Maclaurin series of
corresponding to the first terms of the Maclaurin series of 








 corresponding to the first terms of the Maclaurin series of
corresponding to the first terms of the Maclaurin series of 












 ,
, 
 . First, we would like to calculate
. First, we would like to calculate 









 ,
, 


 being complex numbers, we will study the convergence of the above power series in the complex plane. If R is the largest radius such that the series converges for all
being complex numbers, we will study the convergence of the above power series in the complex plane. If R is the largest radius such that the series converges for all  , then R is called the 'radius of convergence'. In its radius of convergence the power series converges to
, then R is called the 'radius of convergence'. In its radius of convergence the power series converges to  :
:
 that is continuous on
that is continuous on  (a circle in the complex plane centred on
(a circle in the complex plane centred on  and oriented counterclockwise):
and oriented counterclockwise):











 that is infinitely differentiable at a real or complex number
that is infinitely differentiable at a real or complex number  is the power series:
is the power series:

 , we obtain the so-called Maclaurin series:
, we obtain the so-called Maclaurin series:



 for the Taylor series or
for the Taylor series or  for the Maclaurin series.
for the Maclaurin series. or
or  etc. has no meaning for a computer. For a computer,
etc. has no meaning for a computer. For a computer, 






![\displaystyle = x - \frac{x^2}{2} + \frac{x^3}{3} - \frac{x^4}{4} + \cdots, \quad x \in (-1,1]](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%3D+x+-+%5Cfrac%7Bx%5E2%7D%7B2%7D+%2B+%5Cfrac%7Bx%5E3%7D%7B3%7D+-+%5Cfrac%7Bx%5E4%7D%7B4%7D+%2B+%5Ccdots%2C+%5Cquad+x+%5Cin+%28-1%2C1%5D+&bg=ffffff&fg=000&s=0&c=20201002)















 is
is  and
and  is defined on
is defined on  . We can consider
. We can consider  (
( ensures convergence of the series):
ensures convergence of the series):
 as:
as:


 , we can use the continued fraction algorithm, which iteratively takes the integer part of the number and inverts its fractional part. In the case of the number
, we can use the continued fraction algorithm, which iteratively takes the integer part of the number and inverts its fractional part. In the case of the number  , we proceed as follows:
, we proceed as follows:




 ,
,  ,
,  ,
,  . Thus, we can write
. Thus, we can write  as a continued fraction:
as a continued fraction:




 for
for  or
or  for
for  ), which may cause convergence issues. The continued fraction algorithm ensures integer coefficients and reliable convergence.
), which may cause convergence issues. The continued fraction algorithm ensures integer coefficients and reliable convergence. , we can use its decimal expansion or a series approximation. For example, we can use the following series:
, we can use its decimal expansion or a series approximation. For example, we can use the following series:
 be the largest integer that does not exceed
be the largest integer that does not exceed 







